

A Google DeepMind lançou um conjunto de novas ferramentas para ajudar os robôs a aprender de forma autónoma, mais rápida e eficazmente, em ambientes novos.
Treinar um robô para executar uma tarefa específica num único ambiente é uma tarefa de engenharia relativamente simples. Para que os robôs nos sejam verdadeiramente úteis no futuro, terão de ser capazes de executar uma série de tarefas gerais e aprender a fazê-las em ambientes que nunca experimentaram antes.
No ano passado, a DeepMind lançou o seu Modelo de controlo robótico RT-2 e RT-X. O RT-2 traduz comandos de voz ou de texto em acções robóticas.
As novas ferramentas anunciadas pela DeepMind baseiam-se no RT-2 e aproximam-nos de robôs autónomos que exploram diferentes ambientes e aprendem novas competências.
Nos últimos dois anos, os modelos de grandes fundações provaram ser capazes de perceber e raciocinar sobre o mundo que nos rodeia, abrindo uma possibilidade fundamental para a robótica de escala.
Apresentamos o AutoRT, uma estrutura para orquestrar agentes robóticos na natureza usando modelos de fundação! pic.twitter.com/x3YdO10kqq
- Keerthana Gopalakrishnan (@keerthanpg) 4 de janeiro de 2024
AutoRT
O AutoRT combina um Modelo de Linguagem Grande (LLM) fundamental com um Modelo de Linguagem Visual (VLM) e um modelo de controlo de robôs como o RT-2.
O VLM permite ao robô avaliar o cenário à sua frente e transmitir a descrição ao LLM. O LLM avalia os objectos identificados e a cena e gera uma lista de potenciais tarefas que o robô pode realizar.
As tarefas são avaliadas com base na sua segurança, nas capacidades do robô e no facto de a realização da tarefa acrescentar ou não novas competências ou diversidade à base de conhecimentos do AutoRT.
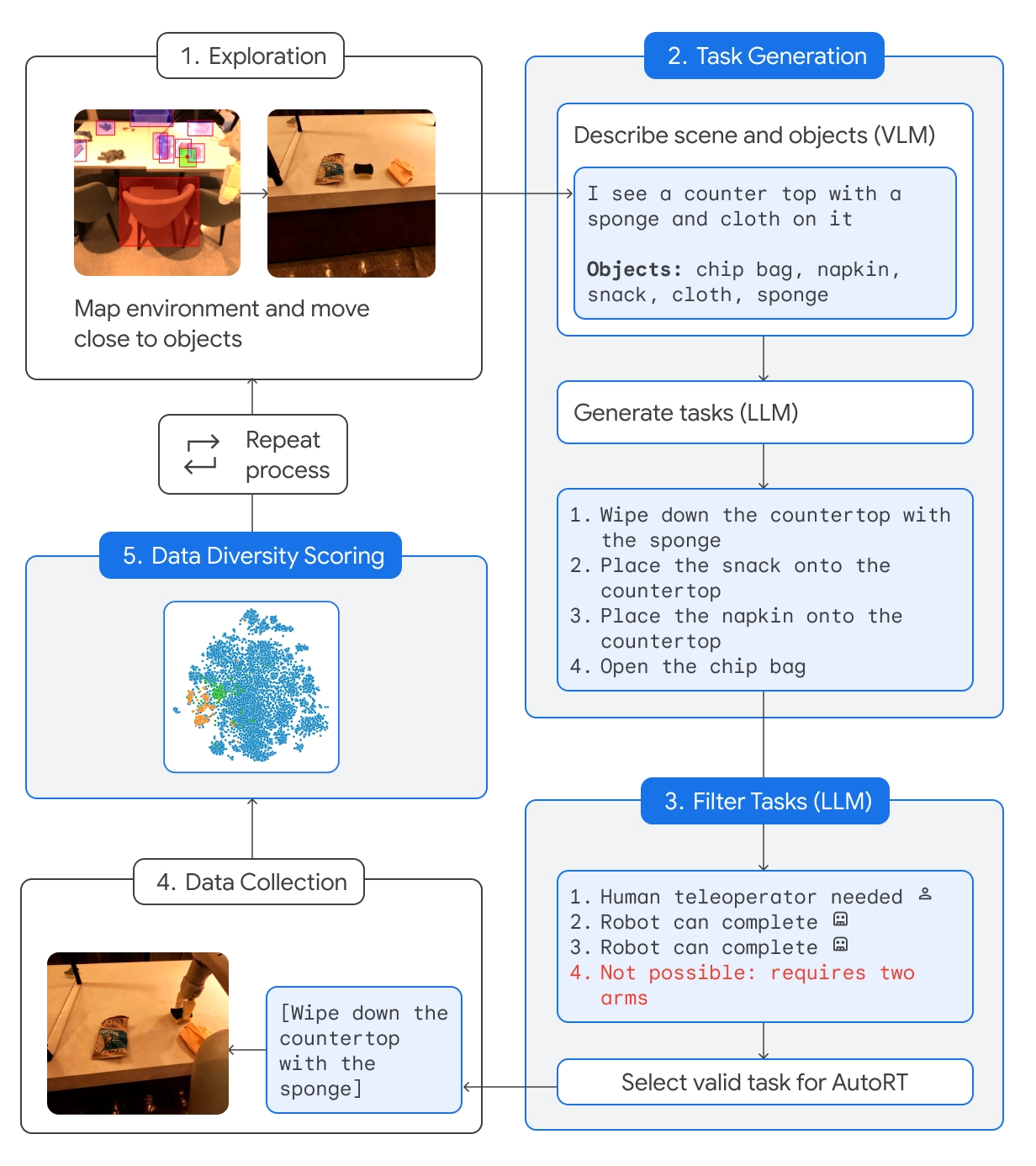
A DeepMind afirma que com o AutoRT "orquestrou em segurança até 20 robôs em simultâneo, e até 52 robôs únicos no total, numa variedade de edifícios de escritórios, reunindo um conjunto de dados diversificado que inclui 77 000 ensaios robóticos em 6650 tarefas únicas".
Constituição robótica
Enviar um robô para novos ambientes significa que este irá encontrar situações potencialmente perigosas que não podem ser planeadas especificamente. Ao utilizar uma constituição robótica como guia de orientação, os robôs recebem uma proteção de segurança generalizada.
A constituição robótica é inspirada nas 3 leis da robótica de Isaac Asimov:
- Um robô não pode ferir um ser humano.
- Este robô não deve tentar realizar tarefas que envolvam seres humanos, animais ou seres vivos. Este robô não deve interagir com objectos afiados, como uma faca.
- Este robô só tem um braço, pelo que não pode executar tarefas que exijam dois braços. Por exemplo, não consegue abrir uma garrafa.
O cumprimento destas directrizes evita que o robô seleccione uma tarefa da lista de opções que possa magoar alguém ou danificar-se a si próprio ou a outra coisa.
SARA-RT
O SARA-RT (Self-Adaptive Robust Attention for Robotics Transformers) pega em modelos como o RT-2 e torna-os mais eficientes.
A arquitetura da rede neural do RT-2 assenta em módulos de atenção de complexidade quadrática. Isto significa que se duplicarmos a entrada, adicionando um novo sensor ou aumentando a resolução da câmara, precisamos de quatro vezes mais recursos computacionais.
O SARA-RT utiliza um modelo de atenção linear para afinar o modelo robótico. Isto resultou numa melhoria de 14% na velocidade e em ganhos de precisão de 10%.
RT-Trajetória
Converter uma tarefa simples, como limpar uma mesa, em instruções que um robô possa seguir é complicado. A tarefa tem de ser convertida da linguagem natural para uma sequência codificada de movimentos e rotações do motor para acionar as peças móveis do robô.
O RT-Trajectory adiciona uma sobreposição visual 2D a um vídeo de treino para que o robô possa aprender intuitivamente que tipo de movimento é necessário para realizar a tarefa.
Assim, em vez de apenas dar instruções ao robô para "limpar a mesa", a demonstração e a sobreposição de movimentos dão-lhe uma melhor hipótese de aprender rapidamente a nova competência.
A DeepMind afirma que um braço controlado pelo RT-Trajectory "alcançou uma taxa de sucesso de 63%, em comparação com 29% para o RT-2".
Também pode criar trajectórias observando demonstrações humanas, compreendendo esboços e até desenhos gerados por VLM.
Quando testado em 41 tarefas não vistas nos dados de treino, um braço controlado pelo RT-Trajectory obteve uma taxa de sucesso de 63%. https://t.co/rqOnzDDMDI pic.twitter.com/bdhi9W5TWi
- Google DeepMind (@GoogleDeepMind) 4 de janeiro de 2024
A DeepMind está a disponibilizar estes modelos e conjuntos de dados a outros programadores, pelo que será interessante ver como estas novas ferramentas aceleram a integração de robôs alimentados por IA na vida quotidiana.



